



Maschinen die Orientierung verschaffen
Damit sich Roboter, Autos oder Drohnen autonom im Raum bewegen können, müssen sie diesen verstehen. Algorithmen modellieren aus unzähligen Kamerabildern eine 3D-Struktur der Umgebung und bieten so den Maschinen Orientierung. Sie können aber auch für Augmented oder Virtual Reality verwendet werden.
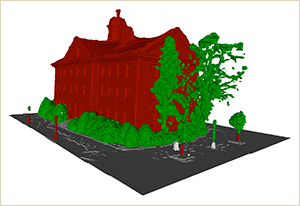
Auf Grund von Kamerabildern wird hier einerseits die Struktur der Szene rekonstruiert. Gleichzeitig liefern unsere Algorithmen auch eine «semantische» Interpretation: Die Szene wird automatisch unterteilt in «Haus», «Strasse», «Gebuesch». Diese reichhaltige Beschreibung erlaubt ein tieferes Verständnis der Umgebung.
Um die 3D-Struktur und den Inhalt einer Szene auf Grund von Kamerabildern zu verstehen und zu rekonstruieren, müssen Algorithmen in der Lage sein, die grossen Datenmengen, welche von Kameras mit Hunderttausenden von Pixeln mit bis zu 30 Bildern pro Sekunde generiert werden, effizient zu verarbeiten und in Echtzeit nützliche Informationen aus ihnen zu ziehen.
Diese Informationen erlauben es selbstfahrenden Autos oder Mobilegeräten wie Smart Phones, die 3D-Struktur der Umgebung zu erfassen und ihre Position zu bestimmen. Die gleichen Algorithmen werden aber auch für Augmented oder Virtual Reality-Projekte verwendet und könnten dereinst auch als Navigationshilfe für blinde Personen dienen.
An der Scientifica zeigt Ihnen die «Computer Vision and Geometry»-Gruppe Prototypen und Anwendungen ihrer Algorithmen. So präsentiert sie etwa den Prototypen eines autonomen Gartenroboters, der selbständig Hecken schneiden kann. Hier lernen sie auch unterschiedliche Geräte (Google Tango und Microsoft HoloLens) für Augmented Reality kennen und können mit dieser Technologie selbst experimentieren. Gleichzeitig erfahren Sie mehr zu selbstfahrenden Autos, unbemannten Drohnen und 3D-Rekonstruktion auf Mobilegeräten.
Beteiligte
Prof. Marc Pollefeys
Post-Docs und Doktorierende der Computer Vision and Geometry Gruppe
Folgende Institutionen und Firmen haben die Forschung unterstützt:
- Swiss National Science Foundation project Nr. 157101 and 156973
- Grant 16703.1 PFES-ES of CTI Switzerland
- The EU’s 7th Framework Programme (FP7/2007-2013) under grant Nr. 269916 (V-Charge).
- The EU’s Horizon 2020 research and innovation program under grant Nr. 688007 (TrimBot2020).
- Google’s Project Tango
- Qualcomm