



Robots to the Rescue!
Einsätze in Katastrophengebieten bergen für Rettungskräfte oft hohe Risiken. Teams von fahrenden und fliegenden Robotern könnten künftig solche Aufgaben übernehmen. Flugroboter orientieren sich dank intelligenter Bildanalyse im Katastrophengebiet und leiten fahrende Roboter im Gelände an.
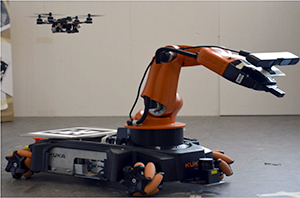
Das Roboter-Rettungs-Team: Der Quadrocopter schwebt über dem fahrenden Roboter und lenkt ihn durch das Katastrophengebiet zu Verschütteten.

Eingestürztes Reaktorgebäude in Fukushima: Auf radioaktiv verseuchten Unglücksstellen könnten Roboter die für Menschen gefährliche Arbeit erledigen.
Bei Katastropheneinsätzen könnte das Risiko für die Rettungskräfte verringert werden, wenn Roboter eingesetzt würden. Zum Beispiel können sie nach einem Erdbeben einsturzgefährdete Gebäude nach Überlebenden absuchen oder radioaktiv verseuchte Gebiete inspizieren. Heute werden solche Roboter von Experten ferngesteuert. Dafür ist jedoch eine ständige Verbindung zum Roboter nötig, was aber nicht immer gewährleistet werden kann. Daher ist es entscheidend, dass Roboter zukünftig selbstständiger handeln können.
Unsere Forschung beschäftigt sich mit Teams von fahrenden und fliegenden Robotern, die in anspruchsvollen Such- und Rettungsmissionen zusammenar- beiten. Diese Roboter ergänzen sich ideal: Fahrende Roboter sind in der Lage, schwerere Ausrüstung zu transportieren, können aber durch Hindernisse blockiert werden. Fliegende Roboter sind hingegen schnell, können Hindernisse einfach umgehen und sehen das Geschehen aus der Vogelperspektive. Aufgrund ihrer Grösse können sie aber keine grossen Lasten mit sich tragen.
Wir kombinieren die Stärken beider Roboter: Zum Beispiel kann der fliegende Roboter nach Verletzten suchen und den besten Weg dorthin für den Roboter am Boden erkundschaften. Dieser ist somit schneller vor Ort, um Hilfe zu leisten.
An unserem Stand zeigen wir einen Helikopter, der einen Roboter am Boden unterstützt. Das Ziel dieses Roboter-Teams ist es, ohne menschliche Unterstützung Objekte einzusammeln.
Beteiligte
Prof. Dr. Davide Scaramuzza
Matthias Fässler
Elias Müggler
Flavio Fontana
Christian Forster
Benjamin Keiser
Christian Saner